Overview
Design and Details
MPT is a modular space mission planning software framework designed to plan, simulate and track mission success from inception to execution with user-specified levels of detail and plug and play capability with external tools. It is designed to aid mission planners by coordinating daily activities through a single user interface.
MPT’s client/server architecture combines a Windows Presentation Foundation thick client (for enhanced visualization) with a Linux based, containerized set of services and external tools on the server side for enhanced performance, scalability and extensibility. MPT is designed to scale from a single client/mission on a laptop, to multiple clients supporting multiple missions using a cluster of servers.
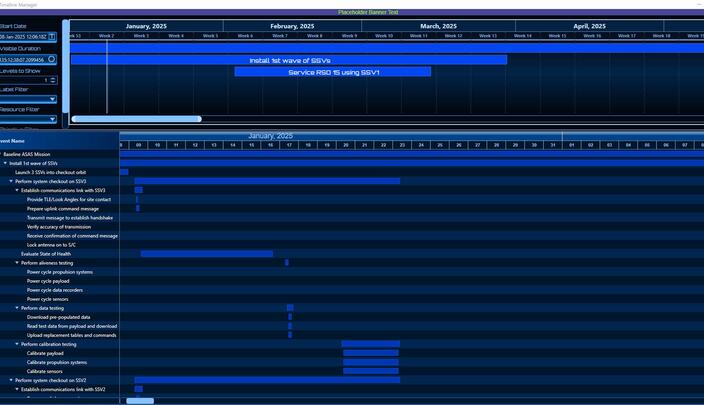
Planning Around Activity Decomposition
MPT’s hierarchical framework supports a user-defined level of complexity at the Mission, Plan and Event level:
- Mission: The highest level of planning. A mission uses common hardware models (resources), objectives and other metadata across all plans within that mission. Each mission is a separate set of data.
- Plan: A set of specific activity details that cover some, or all, of the mission’s timespan broken down into events. Plans are separate from one another and can be compared, split or merged.
- Event: A single activity and the associated details. Events can be broken into smaller, more-detailed events based on planning needs.